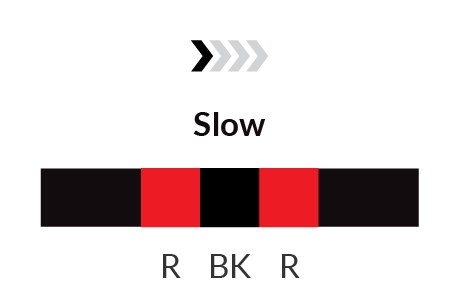
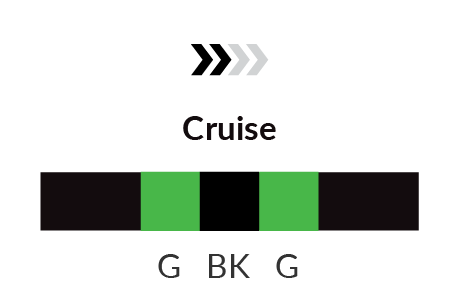
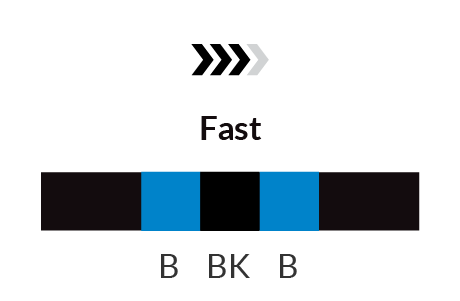
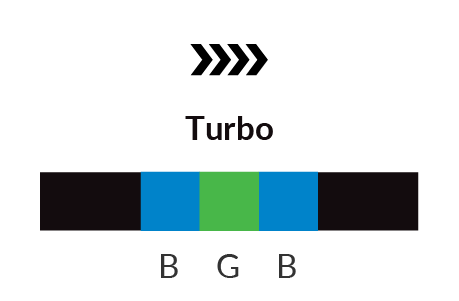
Speed


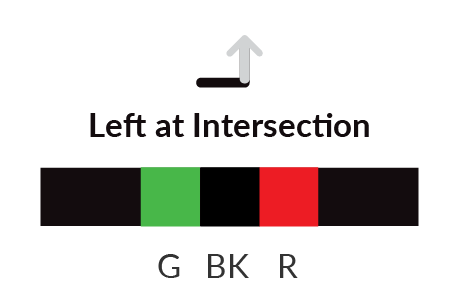
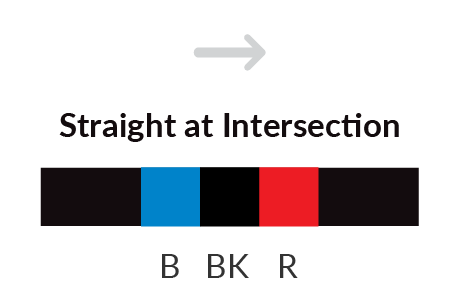
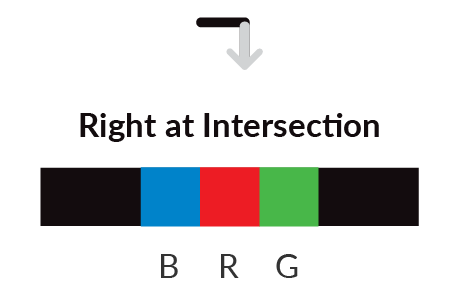
Direction
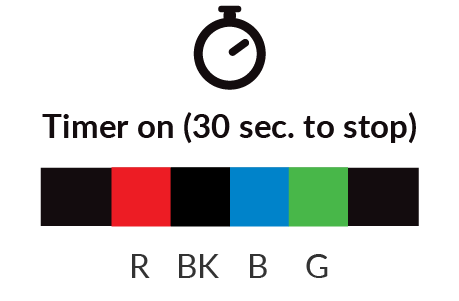
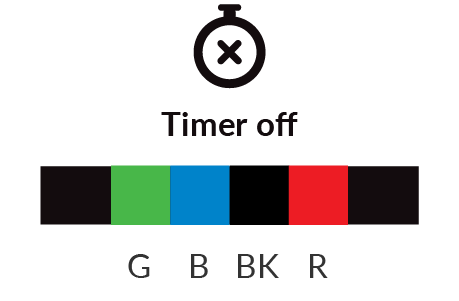
Timers
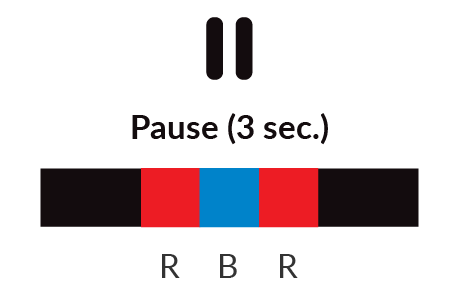
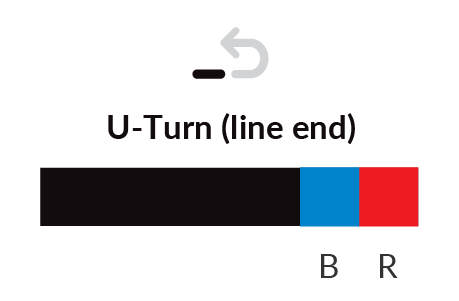
Special Moves
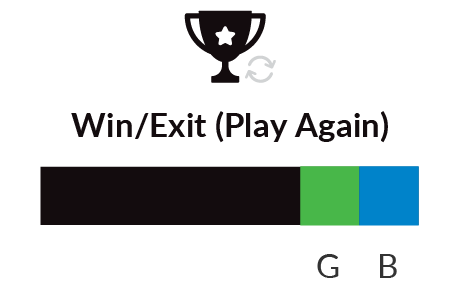
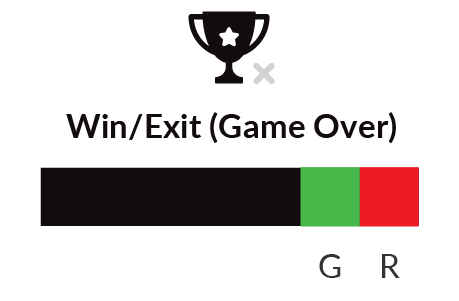
Wins/Exits
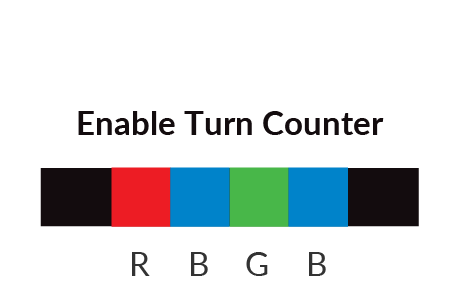
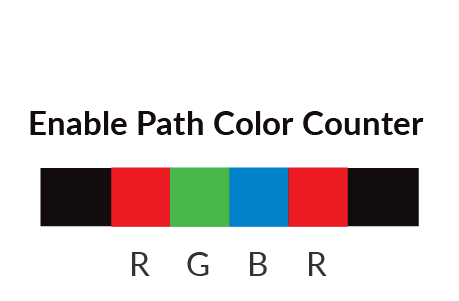
Counters

Speed
Direction
Timers
Special Moves
Wins/Exits
Counters